|
|
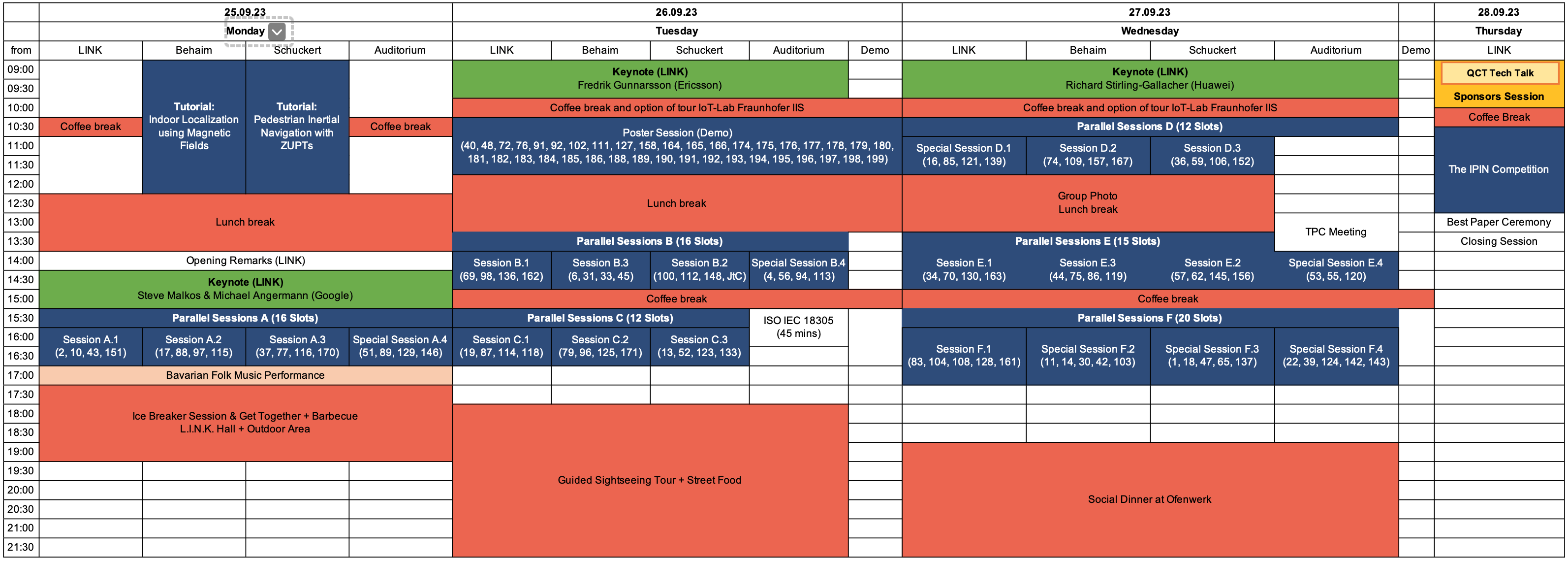
D.1 Machine Learning for Localization and Navigation (SS3/3)
Location: LINK – chair: Sebastian Kram
|
|
|
|
| RP
16Proximity Estimation with BLE RSSI and UWB Range Using Machine Learning Algorithm
Satinath Debnath and Kyle O'Keefe |
| RP
85Simulation of machine learning inferences in real-time operating system to improve direction finding in an embedded environment
Nika Nizharadze, Matthias Mahlig and Timon Merk |
| RP
121Multipath Delay Estimation in Complex Environments using Transformer
Jonathan Ott, Maximilian Stahlke, Sebastian Kram, Tobias Feigl and Christopher Mutschler |
| RP
139Deep Learning based Positioning with Beamformed CSI Fingerprints
Anastasios Foliadis, Mario H. Castañeda Garcia, Richard Stirling-Gallacher, Xitao Gong and Reiner S. Thomä |
|
|
D.2 Humans and Motion
Location: Behaim – chair: Ni Zhu
|
|
|
|
| RP
74A Comparative Study of Gait Analysis Technologies
Luisa Ruiz, Evelyn Alecto, Ana Jimenez Martín, Fernando Seco, Juan Jesus Garcia and Antonio Jimenez Ruiz |
| RP
109Temporal Stability on Human Activity Recognition based on Wi-Fi CSI
Miguel Matey-Sanz, Joaquín Torres-Sospedra and Adriano Moreira |
| RP
157Unsupervised Analysis of Daily Routine Evolution for Elderly People Using Room-Level Localisation
Sergio Lluva-Plaza, Joaquín Torres-Sospedra, Juan Jesus Garcia, Jose Manuel Villadangos and Ana Jimenez Martín |
| RP
167Crowdsourced Wi-Fi Access Point Localization using Vertical Movement Detection
HyeonSeon An, Hayoung Gu, Sumin Joo and Jeongsik Choi |
|
|
D.3 Inertial and Hybrid Systems
Location: Schuckert – chair: Miguel Ortiz
|
|
|
|
| RP
36Gyro-Free Kalman Filter with Unknown Inputs for SO(3)-based Attitude Estimation
Ghadeer Shaaban, Hassen Fourati, Alain Kibangou and Christophe Prieur |
| RP
59Effect of Non-orthogonality in Dual-axis Gimbal on Rotational Inertial Navigation System
Jaehyuck Cha, Chan Gook Park, Seong Yun Cho, Minsu Jo and Chanju Park |
| RP
106Precise Indoor Positioning System for Mobile Robots via Smoothed UWB/IMU Sensor Fusion
Mahmoud Elsanhoury, Jyri Nieminen, Petri Välisuo, Akpojoto Siemuri, Janne Koljonen, Mohammed Salem Elmusrati and Heidi Kuusniemi |
| RP
152Step Length Is a More Reliable Measurement Than Walking Speed for Pedestrian Dead-Reckoning
Fatemeh Elyasi and Roberto Manduchi |
|
12:00-13:30
|
Group Photo + Lunch break
|
|
13:00-14:00
|
TPC meeting
|
|
13:30-15:00
|
Parallel Sessions E
|
|
|
E.1 Fingerprinting & Spatial Models (Session 2)
Location: LINK – chair: Elizabeth Colin
|
|
|
|
| RP
34Time-based vs. Fingerprinting-based Positioning Using Artificial Neural Networks
ANIL KIRMAZ, Taylan Sahin, Diomidis Michalopoulos and Wolfgang Gerstacker |
| RP
70An empirical multi-wall NLOS ranging model for Wi-Fi RTT indoor positioning
Qing Liang, Guohao Zhang and Li-Ta Hsu |
| RP
130Indoor 3D Positioning Method for a Microphone using a Single Speaker
Masanari Nakamura, Yuta Funada, Hiroaki Murakami, Hiromichi Hashizume and Masanori Sugimoto |
| RP
163RSS Channel-Based Integration for BLE Fingerprinting Positioning
Fernando J. Aranda-Polo, Felipe Parralejo, Teodoro Aguilera Benítez, Fernando J. Álvarez Franco and Joaquín Torres-Sospedra |
|
|
E.2 Magnetic Positioning
Location: Schuckert – chair: Raúl Montoliu Colás
|
|
|
|
| RP
57Magneto-Inertial Dead-Reckoning Navigation with Walk Dynamic Model in Indoor Environment
Raphaël Neymann, Alexis Berthou, Jean-François Jourdas, Hugo Lhachemi, Christophe Prieur and Antoine Girard |
| RP
62Smartphone-Based Multi-Mode Geomagnetic Matching/PDR Integrated Indoor Positioning
Kefan Shao, Zengke Li, Mingcong Shu, Qiang Guo and Qi Wu |
| RP
145Magnetic Field-based Indoor Localization of a Tracked Robot with Simultaneous Calibration
Benjamin Siebler, Tim Gerstewitz, Stephan Sand and Uwe D. Hanebeck |
| RP
156Close-Range Indoor Proximity Detection for COVID-19 Exposure Notifications Using Smartphone Magnetometer Traces
Zach Van Hyfte and Avideh Zakhor |
|
|
E.3 Mapping & SLAM
Location: Behaim – chair: Adriano Jorge Cardoso Moreira
|
|
|
|
| RP
86 R EL-OGISLAM: Escalator Landmark-based Occupancy Grid Inertial SLAM framework
Xiaodong Li, Zhi Xiong, yan cui, Yinshou Sun and Yunong Qian |
| RP
44Factor Graph Optimization-based Indoor Pedestrian SLAM with Probabilistic Exact Activity Loop Closures using Smartphone
Shiyu Bai, Weisong Wen, Li-Ta Hsu and Yue Yu |
| RP
75Calibration-free radiomap construction based on graph map matching
Rory Hughes, Lei Tao, Ilari Vallivaara and Firas Alsehly |
| RP
119Understanding and Using Spatial Landmarks of Visually Impaired People for Navigation Applications
Min Wang, Ni Zhu, Valérie Renaudin, Aurelie Dommes and Myriam Servieres |
|
|
E.4 Seamless Transition between Localization Systems (SS6)
Location: Auditorium – chair: Antonino Crivello
|
|
|
|
| RP
53Seamless Indoor and Outdoor Positioning with Hybrid Bluetooth AoA and GNSS Signals
Marco Velapatino Gamarra, Stylianos Papaharalabos, Farshid Rezaei, David Bartlett and Peter Karlsson |
| RP
55Radio-Frequency Handoff Strategies to Seamlessly Integrate Indoor Localization Systems
Francesco Furfari, Michele Girolami and Paolo Barsocchi |
| RP
120Uncertainty-based Fingerprinting Model Selection for Radio Localization
Maximilian Stahlke, Tobias Feigl, Sebastian Kram, Bjoern M. Eskofier and Christopher Mutschler |
|
|
F.1 ToA, TDoA, ToF (Session 2)
Location: LINK – chair: Yuan Hong 袁洪
|
|
|
|
| RP
83Ultra-Precise Synchronization for TDoA-based Localization Using Signals of Opportunity
Thomas Maul, Sebastian Klob and Joerg Robert |
| RP
104Low-Cost and Ultra-Precise Synchronization Concept for TDoA Localization of Dairy Cows
Sebastian Klob, Thomas Maul and Joerg Robert |
| RP
108Ultrasonic Device-Free Localisation System Modelling for Performance Analysis
Alejandro García Requejo, Maria del Carmen Perez, Alvaro Hernandez, William Wright and Liam Marnane |
| RP
128FTM-Broadcast: Efficient Network-wide Ranging
Yann Busnel and Hervé Rivano |
| RP
161FMCW Based Positioning Using Multiple SHF RFID Transponders
Sebastian Böller, Thorben Grenter and Anton Grabmaier |
|
|
F.2 Future 5G/GNSS High-precision Positioning for Mobile Terminals in Challenging Environments (SS7)
Location: Behaim – chair: Tengfei Wang
|
|
|
|
| RP
11Enhanced 5G Sidelink Ranging Based on Carrier Aggregation
Franziska Rasp, Ernst Eberlein, Bastian Perner, Elke Roth-Mandutz and Susanne Hipp |
| RP
14Applying Carrier Phase to 5G Positioning with Testbed Verification
Yi Wang, Cheng Li, Han Wang and Peiying Zhu |
| RP
30Probabilistic Ray-Tracing Aided Positioning at mmWave frequencies
Vincent Corlay, Viet-Hoa Nguyen, Nicolas Gresset and Cristina Ciochina |
| RP
42Demonstrating the Merits of Integrating Multipath Signals into 5G LoS-Based Positioning Systems for Navigation in Challenging Environments
Qamar Bader, Sharief Saleh, Mohamed Elhabiby and Aboelmagd Noureldin |
| RP
103An LSTM Approach for Modelling Error of Smartphone-reported GNSS Location Under Mixed LOS/NLOS Environments
Yue Yu, Wenzhong Shi, Zhewei Liu, Shiyu Bai, Liang Chen and Ruizhi Chen |
|
|
F.3 Open Research Data and Reproducibility in Indoor Positioning Research (SS1)
Location: Schuckert – chair: Anagnostopoulos Grigorios
|
|
|
|
| RP
1Let's Talk about k-NN for Indoor Positioning: Myths and Facts in RF-based Fingerprinting
Joaquín Torres-Sospedra, Cristiano Pendao, Ivo Silva, Filipe Meneses, Darwin Quezada Gaibor, Raul Montoliu, Antonino Crivello, Paolo Barsocchi, Antoni Perez-Navarro and Adriano Moreira |
| RP
18Towards Quality Wi-Fi Synthetic Data for Indoor Positioning Evaluation
Cristiano Pendao, Ivo Silva, Adriano Moreira, Fernando J. Aranda-Polo and Joaquín Torres-Sospedra |
| RP
47SIMUL: Synchronized IMU Dataset of Walking People at Six Body Locations
Steffen Kastner, Markus Ebner, Markus Bullmann, Toni Fetzer, Frank Deinzer and Marcin Grzegorzek |
| RP
65RETSINA: Reproducibility and Experimentation Testbed for Signal-Strength Indoor Near Analysis
Anna Baskin, Brian Nixon, Panos K. Chrysanthis, Christos Laoudias and Constantinos Costa |
| RP
137UJI Probes: Dataset of Wi-Fi Probe Requests
Tomas Bravenec, Joaquín Torres-Sospedra, Michael Gould and Tomas Fryza |
|
|
F.4 Experimental Evaluation of Photodiode-based Visible Light Positioning (SS4)
Location: Auditorium – chair: David Plets
|
|
|
|
| RP
22Smartphone Indoor Positioning using Inertial and Ambient Light Sensors
Masanori Sugimoto, Minoru Suenaga, Hiroki Watanabe, Masanari Nakamura and Hiromichi Hashizume |
| RP
39The Performance of RSS Based Visible Light Positioning Techniques under Different Uniformity Conditions
Jorik De Bruycker, Tom Dhaene and Nobby Stevens |
| RP
124Centralized Optical 3D Positioning System for Emitting Tags
Elena Aparicio-Esteve, Jesus Urena, Alvaro Hernandez, David Moltó, José M. Villadangos and Miguel Cubero |
| RP
142A Novel Differential Phase of Arrival-based Experimental Visible Light Positioning System
Yuanyuan Xu, Zixuan Ling, Jianeng Mei, Yuhao Wang, Xiaodong Liu, Zhenghai Wang and xun zhang |
| RP
143A Novel Experimental Visible Light Positioning System with Low Bandwidth Requirement and High Precision Pulse Reconstruction
Xuan Huang, Xueming Pan, Zhixin Wan, Mengzhen Xu, Zhenghai Wang, Xiaodong Liu, Yuhao Wang and xun zhang |