|
|
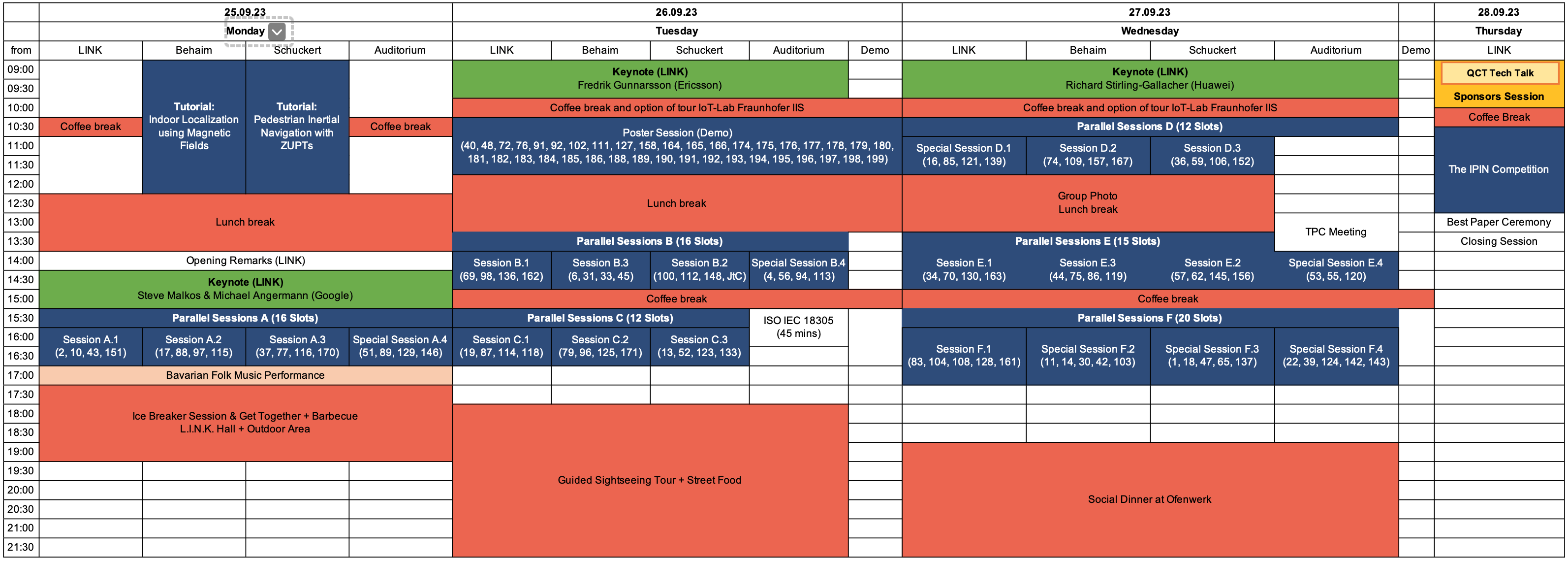
B.1 Position Frameworks
Location: LINK – chair: Francesco Potortì
|
|
|
|
| RP
69Cooperative Localization Using Received Signal Strength and Least Squares Estimation Methods
Nader Moayeri |
| RP
98Potentials of Deterministic Radio Propagation Simulation for AI-Enabled Localization and Sensing
Albrecht Michler, Jonas Ninnemann, Jakob Krauthäuser, Paul Schwarzbach and Oliver Michler |
| RP
136Asynchronous time-based architecture proposal for the positioning of UAVs for indoor TV filming
Javier Díez-González, Paula Verde, Rubén Ferrero-Guillén, Alberto Martínez-Gutiérrez, Rubén Álvarez, Hilde Perez and Joaquín Torres-Sospedra |
| RP
162Server based Bluetooth Low Energy (BLE) Positioning using Received Signal Strength (RSS) Measurements
Christian Gentner, Philipp Hager and Markus Ulmschneider |
|
|
B.2 UWB
Location: Schuckert – chair: Jesús Ureña
|
|
|
|
| RP
100Impact of CIR processing for UWB radar distance estimation with the DW1000 transceiver
Ben Van Herbruggen, Stijn Luchie, Rafael Berkvens, Jaron Fontaine and Eli De Poorter |
| RP
112Device-Level and System-Level Autocalibration of Ultra-Wide-Band Localization
Risang Yudanto, Jianqiao Cheng, Erik Hostens, Miel Van der Wilt and Mats Vande Cavey |
| RP
148UWB-based Positioning System for Indoor Sports
Adrián Juárez, Sergio Fortes, Elizabeth Colin, Carlos Baena, Eduardo Baena and Raquel Barco |
| RP
JTCMulti-hop Self-calibration Algorithm for ultra-wideband (UWB) Anchor Node Positioning
"Ben Van Herbruggen |
|
|
B.3 ToA, TDoA, ToF (Session 1)
Location: Behaim – chair: Antoni Pérez Navarro
|
|
|
|
| RP
45 R Robust Acoustic TOA Estimation based on Multipath Extraction in Frequency Domain
Naizheng Jia, Weimeng Cui, Yuwei Wang, Can Xue, Guangyao Liu, Xinheng Wang, Zuyang Cao and Zhi Wang |
| RP
6RANSAC Methods for Robust Positioning with 5G Networks in Industrial IoT Scenarios
Gustav Lindmark, Johannes Nygren and Satyam Dwivedi |
| RP
31Fast Calculation Method for Time Difference of Arrival-based Localization
Gyula Simon and Gergely Vakulya |
| RP
33A UWB pulse with precursor for ToA measurement
Chris Marshall, Erwin Allebes, Alireza Sheikh, Minyoung Song, Mohieddine El Soussi and Nick Winkel |
|
|
B.4 Machine Learning for Localization and Navigation (SS3/2)
Location: Auditorium – chair: Felix Ott
|
|
|
|
| RP
4Flexible K Nearest Neighbors Classifier: Derivation and Application for Ion-mobility Spectrometry-based Indoor Localization
Philipp Müller |
| RP
56A dynamic model switching algorithm for WiFi fingerprinting indoor positioning
Xu Feng, Khuong An Nguyen and Zhiyuan Luo |
| RP
94LIGHT-PDR: Light Indoor GNSS Carrier Phase Positioning with Machine Learning and Inertial Signal Fusion for Pedestrian Navigation
Ziyou Li, Ni Zhu and Valérie Renaudin |
| RP
113An Efficient Indoor Positioning and Navigation System Based on Bluetooth and Magnetometer
Avinash C. Panday, Salakram Nagwanshi, Venkataramana Badarla and Kalidas Yeturu |
|
|
C.1 AoA
Location: LINK – chair: Richard Stirling Gallacher
|
|
|
|
| RP
19Optimization of 2D location system for smartphones using a single WiFi acces point with Frequency-Scanned Antenna for Real Time Location System
Jose A Lopez Pastor, Miguel Poveda Garcia, Alejandro Gil Martínez, David Cañete Rebenaque and José Luis Gómez-Tornero |
| RP
87A Measurement Platform for the Evaluation of Sparse Acoustic Array Geometries
Georg Fischer, Niklas Thiedecke, Andrea Gabbrielli, Thomas Schaechtle, Fabian Höflinger, Alexander Stolz and Stefan J. Rupitsch |
| RP
1143D millimeter-Wave Indoor Localization
Andrey Sesyuk, Stelios Ioannou and Marios Raspopoulos |
| RP
118Study on a Visible Light Communication and Positioning System Utilizing an Optical Diffusion Filter and Rolling Shutter Sensor
Reo Okawara, Tadashi Ebihara, Naoto Wakatsuki, Keiichi Zempo and Koichi Mizutani |
|
|
C.2 Intelligent Radio Environments
Location: Behaim – chair: Stefan Knauth
|
|
|
|
| RP
171 R UnSpoof: Distance Spoofing-Evident Localization Using UWB
Haige Chen and Ashutosh Dhekne |
| RP
79Indoor Positioning based on Active Radar Sensing and Passive Reflectors: Reflector Placement Optimization
Sven Hinderer, Pascal Schlachter, Zhibin Yu, Xiaofeng Wu and Bin Yang |
| RP
96RIS-aided Positioning Experiments based on mmWave Indoor Channel Measurements
Moustafa Rahal, Benoît Denis, Taghrid Mazloum, Frederic Munoz and Raffaele D'errico |
| RP
125Anchor Layout Optimization for Ultrasonic Indoor Positioning Using Swarm Intelligence
Daan Delabie, Thomas Wilding, Liesbet Van der Perre and Lieven De Strycker |
|
|
C.3 Positioning Systems & Applications
Location: Schuckert – chair: Masanori Sugimoto
|
|
|
|
| RP
13Recent Advances in Positioning Technology of GH-LPS in Challenging Environments
Zhijun Meng, Xiaoyu Li, Yufeng Zhang, Kai Liu, Xiye Guo and Jun Yang |
| RP
52Enhancing Indoor Altitude Estimation on Smartphones: Resolving Ventilation Fan Effects
Kota Tsubouchi, Yuki Hirayama, Takuzo Ikuta and Nobuhiko Nishio |
| RP
123Millimetre Wave Radar System for Safe Flight of Drones in Human-Transited Environments
Felipe Parralejo, José A. Paredes, Fernando J. Aranda-Polo, Fernando J. Álvarez Franco and Josan Moreno |
| RP
133Alternative Approach to Integrate GNSS Doppler in Kalman Filter for Smartphone Positioning
Naman Agarwal, Kyle O'Keefe and Richard Klukas |
|
15:30-16:30
|
IPIN-ISC - IPIN Standardisation Committee report - ISO IEC 18305 (45 mins)
Location: Auditorium – chair: Francesco Potortì, Moayeri, Nader
|
|
18:00-21:30
|
Guided Sightseeing Tour + Street Food
|