|
|
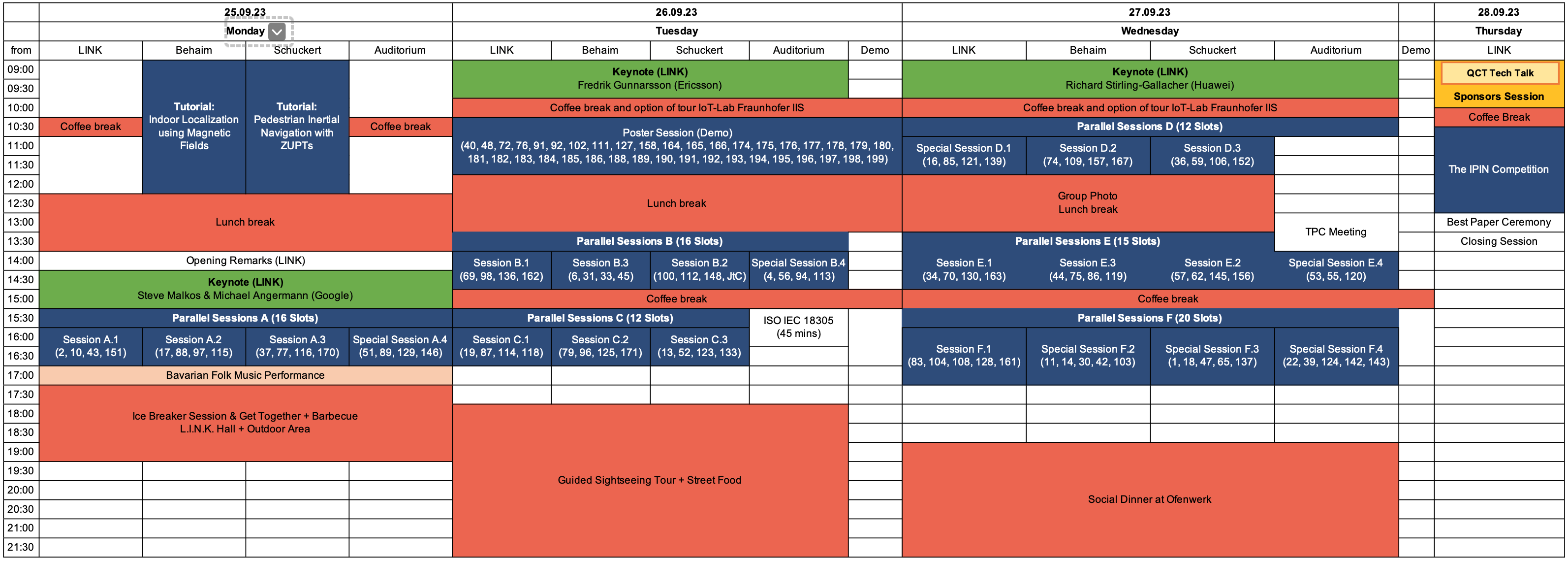
A.1 - Fingerprinting & Spatial Models
Location: LINK – chair: Joaquín Torres Sospedra
|
|
|
|
| RP
2A Multimodal Graph Fingerprinting Method for Indoor Positioning Systems
Yinhuan Dong, Tughrul Arslan and Yunjie Yang |
| RP
10Overcoming Radio Map Degradation in Wi-Fi-based Positioning Systems
Ivo Silva, Cristiano Pendao, Joaquín Torres-Sospedra and Adriano Moreira |
| RP
43Indoor Positioning using DNN and RF Method Fingerprinting-based on Calibrated Wi-Fi RTT
Lila Rana, Jiabin Dong, Shuyu Cui, Jinlong Li, Jungyu Hwang and Joongoo Park |
| RP
151Fingerprint-based fusion of magnetic field data with multiple wireless technologies for indoor mobile robot positioning
Peter Sarcevic, Dominik Csik, Richard Pesti, Massimo Stefanoni, József Sárosi and Ákos Odry |
|
|
A.2 - Fusion Methods
Location: Behaim – chair: Valérie Renaudin
|
|
|
|
| RP
17Towards Robust Visual Inertial Odometry in Feature Sparse Structured Environments
Niclas Joswig, Aiden Morrison, Nadeza Sokolova and Laura Ruotsalainen |
| RP
88Error State Kalman Filter with Implicit Measurement Equations for Position Tracking of a Multi-Sensor System with IMU and LiDAR
Dominik Ernst, Sören Vogel, Ingo Neumann and Hamza Alkhatib |
| RP
97Accurate indoor positioning by combining sensor fusion and obstruction compensation
Jimmy Engström and Jan A. Persson |
| RP
115Pose Graph Optimization for a MAV Indoor Localization Fusing 5GNR TOA with an IMU
Meisam Kabiri, Claudio Cimarelli, Hriday Bavle, Jose Luis Sanchez-Lopez and Holger Voos |
|
|
A.3 PDR
Location: Schuckert – chair: Fuqiang Gu
|
|
|
|
| RP
37Tightly Integrated Motion Classification and State Estimation in Foot-Mounted Navigation Systems
Isaac Skog, Gustaf Hendeby and Manon Kok |
| RP
77Comparison of FGO and KF for PDR-GNSS Fusion on Smartphone for Diverse Pedestrian Movements
Amjad Hussain and Luis Enrique Díez |
| RP
116Indoor Positioning Methods Based on Dual Feet-Mounted IMUs With Distance Constraints
Xiaofeng Ma and Simo Särkkä |
| RP
170Semi-Unsupervised Mitigation of Human Body Shadowing for Indoor UWB pedestrian tracking
Cedric De Cock, Emmeric Tanghe, Wout Joseph and David Plets |
|
|
A.4 Machine Learning for Localization and Navigation (SS3/1)
Location: Auditorium – chair: Maximilian Stahlke
|
|
|
|
| RP
51Machine learning for indoor localization without ground-truth locations
Chanyeong Ju and Jae Hyun Yoo |
| RP
89Comparative Study of Gaussian Processes, Multi Layer Perceptrons, and Deep Kernel Learning for Indoor Visible Light Positioning Systems
Fan Wu, Nobby Stevens, Lieven De Strycker and Francois Rottenberg |
| RP
129Investigating the Impact of Outfits on AI-Based Pedestrian Dead Reckoning with a Wearable Inertial Sensor Placed in the Pocket
Hanyuan FU, Valérie Renaudin, Thomas Bonis and Ni Zhu |
| RP
146Data-driven simulation of wireless communication signal strength in indoor environments
Takuhiro Shimokawa, Kota Tsubouchi, Yoshihiro YK Kawahara, Hiroaki HM Murakami and Masamichi MS Shimosaka |